
Here lie my
projects and work.
About
I’m Will Bricca, and I appreciate building. It is, in my opinion, how we all learn best. At Dragon Q Energy, I’ve found that I thrive in fast-paced environments where ideas move quickly from concept to deployment. Through both personal and academic projects, I’ve designed, built, and tested FPV drones and autonomous rovers, constantly failing along the way. My experience also includes research at Osaka University in inverse kinematics where I worked on running augmentation techniques.

Projects
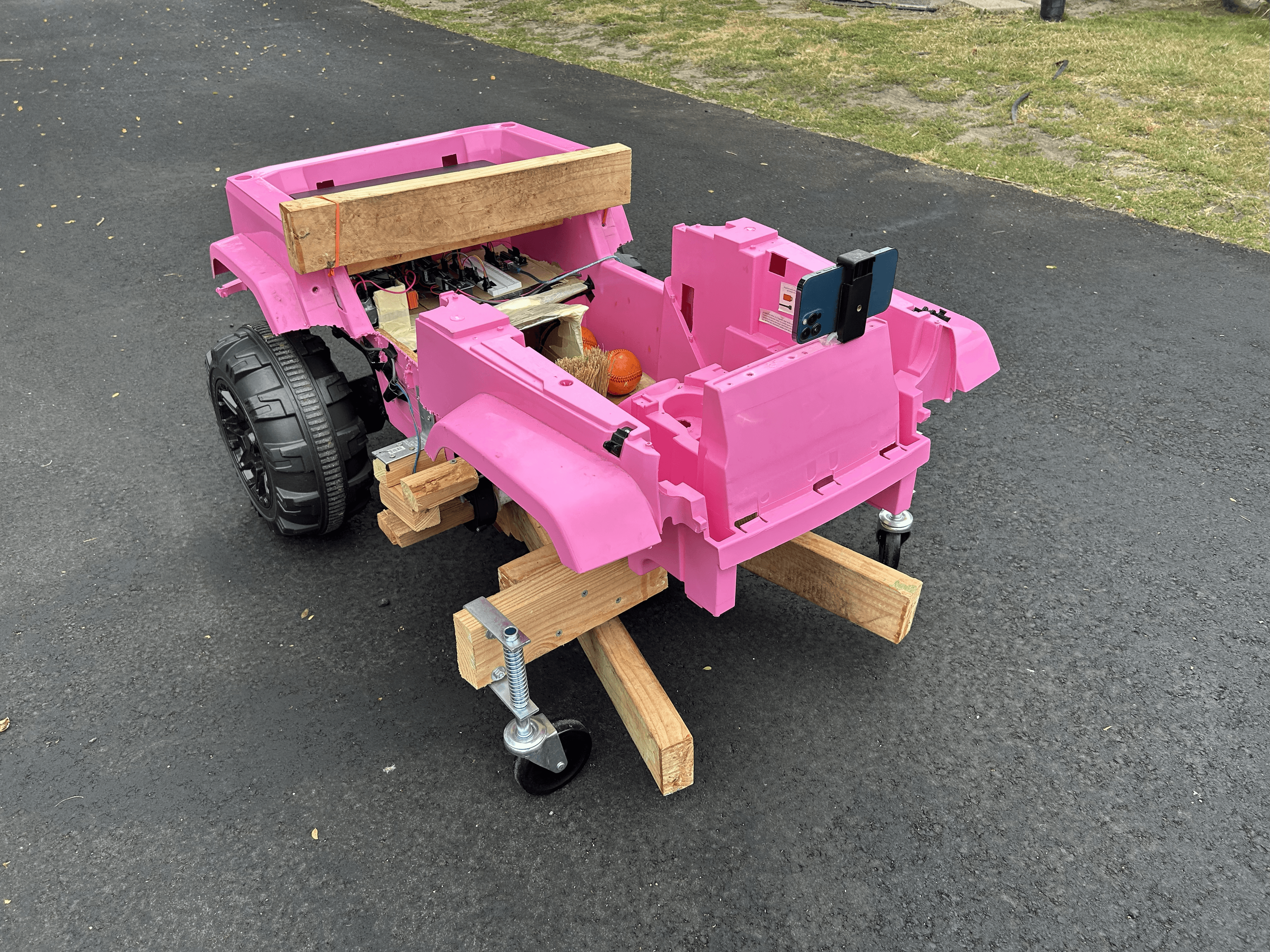
Autonomous Baseball Retriever
Autonomous rover designed to retrieve baseballs from a field, using computer vision and PID control for navigation.

Osaka Research
Experimental research at Osaka University focused on rehabilitative running augmentation.

Fire-Mapping Drone
Both a quad drone for imaging testing, in tandem with development of a VTOL fixed-wing platform for extended wildfire monitoring.
Work Experience
Mechanical Engineer
September 2024 - PresentDragon Q Energy
Design and fabrication of lithium-ion battery housing (48p14s modules, 7.5 kWh MVPs). Lead bus-bar design, welding, and overall production. Automating assembly workflow to begin scaling production currently.
Project Research Engineer
Summer 2024Osaka University
Experimental research in running augmentation techniques aimed at making human running more efficient. More information can be found above in Projects.
Contact
Email: briccawill@gmail.com